咱光通信行业近一段和激光雷达行业有了很多业务上的联系,激光雷达行业的“激光”和光模块的“激光”,有太多重叠的部分了。
昨天在聊激光器、调制器和探测器芯片原理,
顺便也写了一下通信的激光器和激光雷达的激光器差异,用于通信行业的调制器的相位控制技术和激光雷达的相控阵的相位控制技术差异,通信用的探测器和激光雷达接收机探测器的区别。
这三类芯片几乎都可以用在激光雷达上,只是略有差异罢了。
今天略区分一下激光雷达行业的TOF、AMCW和FMCW,他们到底是个啥
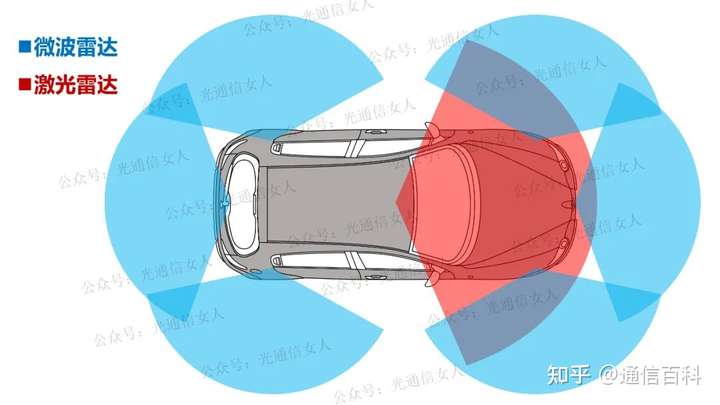
汽车里装的雷达,有两类,微波雷达和激光雷达,并且这俩雷达是并存的。
微波和激光的区别,就是电磁波的波长不同。
1960年的激光发明,就是在微波相干放大的基础上进行光波相干放大,后来把光波相干放大器起了个名,叫“激光”,受激辐射光放大器。
1966年光纤通信的里程碑点,也是在微波通信原理基础上实现的光波通信。
微波,是毫米波
光波,是微米波
都是电磁波,所以他们作为雷达的基本原理也是相通的。
激光雷达的TOF、AMCW、FMCW这三个词从字面上看,好像理解,又好像不理解。
换算到咱们光纤通信的语言
AM,就是IM/DD直调直检的光模块,用PRBS码型发射出去,把反射回来的光信号重新检测一下,再用“自相关”技术提升一下灵敏度。自相关是个啥,一会儿画图。
FM,就是相干光模块的基本原理,波长可调谐激光器是个啥呀,就是频率可调谐激光器。光的波长x频率=C,C是个常数,真空光速。调波长就等于调频率啊,不同领域的习惯用语不同。
TOF用的是脉冲信号,AMCW和FMCW用的是CW信号,CW和我们常说的CW DFB不一样啊。
TOF的脉冲,就类似咱们PON光模块的突发发射和突发接收模式,一会有脉冲,一会儿没脉冲。
CW,是针对脉冲而言的,以太网模块/相干模块的那种一直发信号的就是CW,连续波,针对的是突发脉冲而言的。
PON的ONU光模块,有一句话,叫发射是突发模式,接收是连续模式,这句话在激光雷达行业就叫,发射端是脉冲模式,接收端是连续波模式。
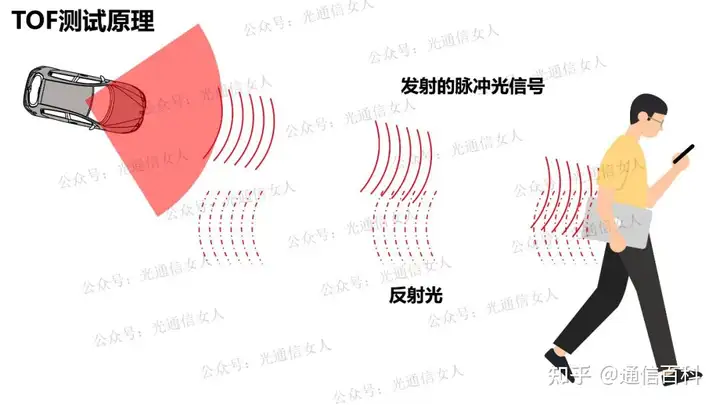
TOF飞行时间
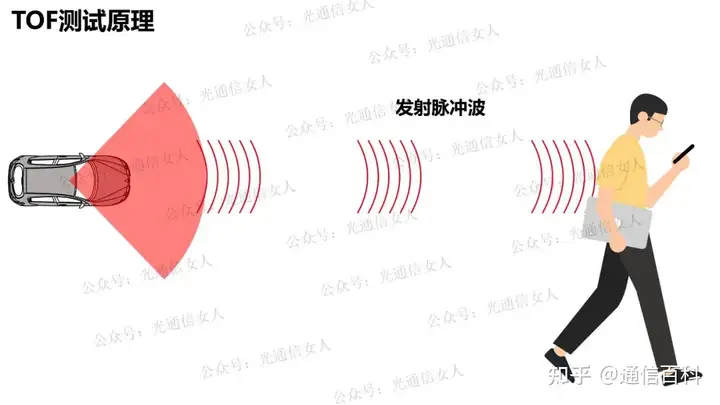
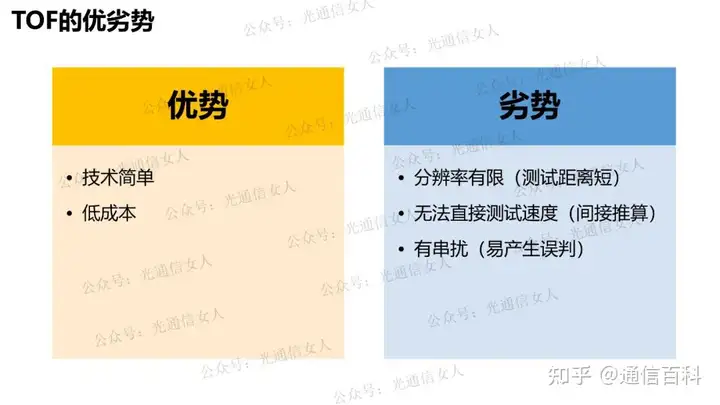
光遇到阻碍物会有反射,检测反射回来的信号,计算时间。距离=光速x时间,就可以推算物理距离,测试的精度不高,原因是光速很快,对时间的识别精度要求极高才能达到一定的距离测试精确度。
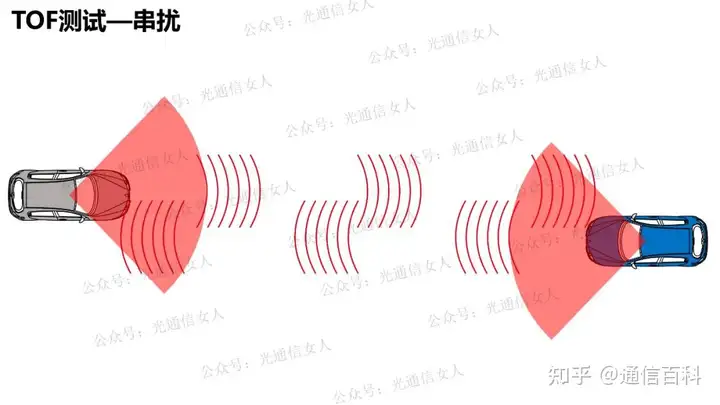
TOF会有光学串扰,发出去的光和接收的光,原本就是一束,波长一样的。将来如果有特别多的车装有激光雷达,行业标准一样,那么就很难识别是自己反射回来的信号,还是其他车的信号。
TOF最大的优势,是利用现有的光学产业链能迅速搭建测试环境,产业化进程很快。
AMCW,就是咱们行业基于NRZ的PRBS码进行IM/DD的常规光模块的那一套方法。

NRZ常常也叫作PAM2,用于区分PAM4,也就是基于二阶幅度调制还是四阶幅度调制,PAM2中间的那个AM,就是激光雷达AMCW中的AM,幅度调制。
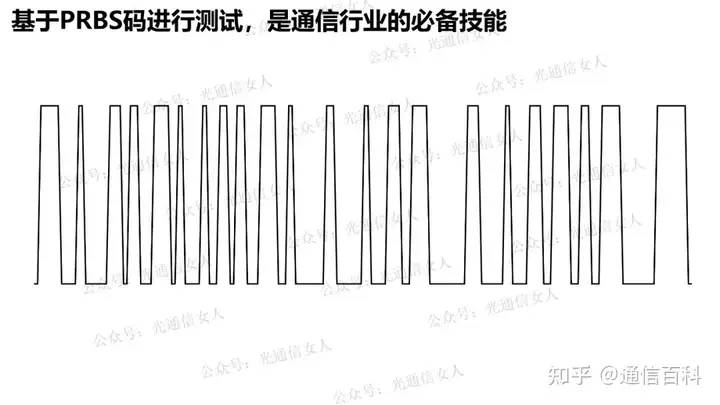
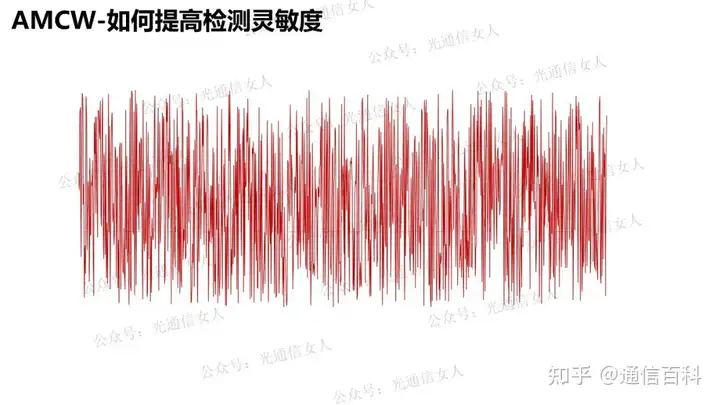
稍微聊一下AMCW的PRBS如何提高灵敏度,延伸检测距离,如果检测的距离很长,我们收回来的信号,几乎被埋在噪声中了是吧?
平常光模块用不上自相关算法,原因是自相关需要一段时间来叠加后提升灵敏度,光模块要处理太多的信息量,没有冗余时间来做算法。
咱们光纤通信中,做过OTDR的对自相关就很理解。
它的基本原理也很简单,我把上个图用两个颜色来标一下,在噪声中埋着的反射信号,这时候探测器无法识别,噪声幅度很大,信号幅度小,在探测器眼里等于没有。
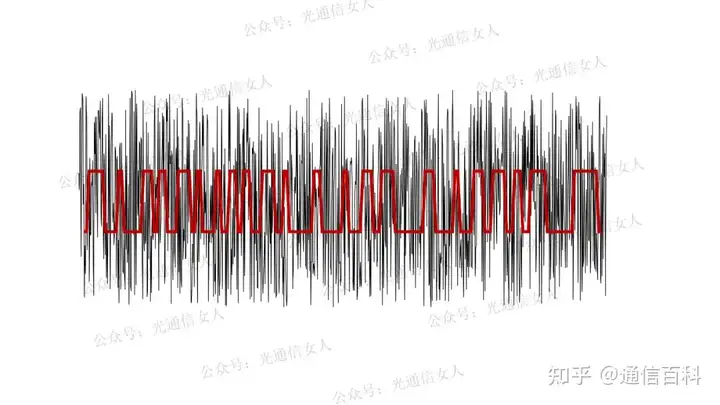
但是噪声是随机的,信号是我们自己的,如果有一个运算放大器,可以是模拟的,也可以是数字的。
我们的信号,有高低之分,咱们把幅度分为两大类“1” “-1”,咱自己的信号,知道排列顺序,遇到-1做减法,1-(-1)=2,信号增加,可噪声没有正负之分,在减法计算中属于(噪声-噪声)的计算。
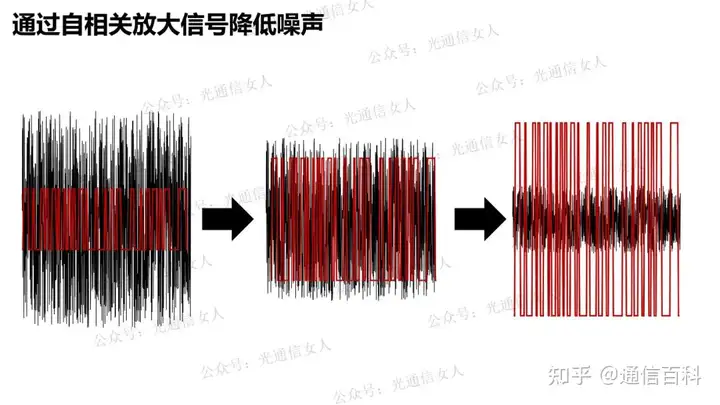
经过好些次的运算,信号越算越大,噪声越算越小。这就是自相关提取信号的过程。

FMCW,调频连续波,改变光波的频率,就是咱行业改变光的波长,波长可调谐激光器啊。 区别在于咱行业的频率改变不关注“线性度”,激光雷达行业关注频率改变的线性程度。
用调频技术,有两个巨大的好处,一个好处是多普勒频移能直接计算被检测物体的行进速度,另一个好处是可以利用相干接收极大的提升灵敏度。
同样的单波100G光模块,直调直检传输距离短,相干模块传输距离相当长,用的就是接收相干进行信号提取,这个提取的灵敏度比AMCW要好很多。
咱行业叫相干接收,就是激光雷达说的那个“拍频”,
